-


-


-


WeChat

Робот для наружного инспекционного контроля
Когда слышишь ?робот для наружного инспекционного контроля?, первое, что приходит в голову — это, наверное, какая-то универсальная машина на гусеницах с кучей датчиков, которая сама всё проверит и выдаст отчёт. По крайней мере, так часто преподносят на презентациях. Но в реальной работе, особенно на инфраструктуре РЖД, всё оказывается сложнее. Много раз видел, как закупленные по принципу ?чтобы было? системы пылятся в углу депо, потому что их просто не приспособили под наши конкретные условия — скажем, под тот же мороз в -40 или под вибрацию от проходящих составов. И вот здесь как раз важно понимать, что робот — это не просто аппаратная часть, а целый комплекс, завязанный на конкретную задачу и среду. Если говорить о моём опыте, то ключевое — это интеграция в существующие процессы, а не замена человека ради замены.
Что на самом деле скрывается за этим термином?
В нашей сфере под роботом для наружного инспекционного контроля обычно подразумевают мобильную платформу, которая способна автономно или полуавтономно перемещаться по заданному маршруту вдоль путей, вокруг зданий депо, по территориям станций и проводить визуальный или инструментальный осмотр объектов. Речь не о футуристическом гуманоиде, а скорее о колёсном или гусеничном модуле, часто с манипулятором, оснащённом камерами высокого разрешения, тепловизорами, лидарами, иногда ультразвуковыми дефектоскопами. Его задача — собирать данные там, где постоянное присутствие человека связано с риском (например, в зоне контактной сети) или просто нерационально из-за масштабов территории.
Однако, главный нюанс, который часто упускают при обсуждении, — это ?наружный?. Это означает не просто работу вне помещения, а противостояние агрессивной внешней среде: пыль, грязь, осадки, перепады температур от +35 летом до -50 зимой в некоторых регионах. Электроника и механика должны быть спроектированы с огромным запасом. Помню случай на одной из тяговых подстанций в Сибири, когда у ?продвинутого? импортного образца просто замерзла смазка в редукторах манипулятора, и он встал колом. Пришлось срочно искать локальное решение. Именно поэтому сейчас многие смотрят в сторону компаний, которые изначально проектируют технику под такие вызовы. Вот, к примеру, ООО Сычуань Хунцзинжунь Технолоджи (сайт: https://www.hjrun.ru) в своей линейке продуктов для эксплуатации и технического обслуживания как раз указывает роботов для осмотра оборудования и объектов на территории депо и станций. Это не случайно — их фокус на железнодорожной отрасли подразумевает, что они, теоретически, должны закладывать эти суровые эксплуатационные требования на этапе разработки.
Ещё один момент — контроль. Инспекция — это не просто съёмка видео. Это выявление отклонений: трещина в бетонном основании опоры, коррозия металлоконструкций, нарушение габарита складированных материалов, обледенение элементов контактной сети. Робот должен не только увидеть это, но и правильно интерпретировать, выделить аномалию из общего фона. Без встроенного ПО для анализа изображений на основе ИИ здесь не обойтись. Но и ИИ нужно долго и упорно обучать на тысячах снимков именно с наших объектов, иначе он будет принимать тень от облака за размыв грунта.
Практика внедрения: от энтузиазма до рутины
Внедрение такого робота для инспекционного контроля — это всегда проект. И он начинается не с распаковки коробки, а с глубокого аудита объекта. Нужно чётко определить: что именно будем контролировать (например, состояние фундаментов светофорных мачт на сортировочной горке), с какой периодичностью, по какому точному маршруту, где будут точки подзарядки, как данные будут интегрироваться в существующую систему управления активами. Без этого робот превратится в очень дорогую игрушку.
У нас был пилотный проект по мониторингу обваловки земляного полотна на одном из перегонов. Использовали отечественную разработку. Робот был хорош технически, но его система навигации на основе GPS терялась вблизи высоких откосов и железнодорожных мостов. Пришлось комбинировать с инерциальной навигацией и пресетными точками по рельсовым меткам. Это добавило работы по первоначальной ?обкатке? маршрута, зато потом он ходил как часы. Это типичная история — идеальных решений нет, всегда нужна адаптация.
Здесь, кстати, полезно посмотреть на подход компаний, которые предлагают комплексные решения. Возьмём ту же ООО Сычуань Хунцзинжунь Технолоджи. Они позиционируют себя как высокотехнологичная компания, занимающаяся интеллектуализацией железнодорожного транспорта. Важно, что в их портфолио, согласно описанию на https://www.hjrun.ru, есть не только отдельные роботы, но и, например, ?интеллектуальная промышленная система MES с цифровым двойником?. Это намекает на то, что они, возможно, понимают важность интеграции данных от робота в общую цифровую модель объекта (тот самый digital twin). Для инспекции это ключевой момент: найденный дефект должен автоматически попадать в карточку актива в MES, инициируя заявку на ремонт. Без этого звена ценность собранных роботом данных резко падает.
Где робот незаменим, а где — пустая трата средств?
Есть задачи, где робот для наружного контроля даёт очевидный экономический и безопасностный эффект. Первое — это регулярный осмотр труднодоступных или опасных зон. Например, пролёты мостов, где нужно искать трещины в нижних поясах ферм. Раньше туда запускали людей с альпинистским снаряжением — это дорого, долго и рискованно. Теперь можно запустить робота с манипулятором и камерой макросъёмки. Второе — это инспекция в нерабочее время или в условиях ограниченной видимости. Тепловизор робота может ночью выявить перегрев подшипника на поворотном круге, который днём был не заметен.
Но есть и антипримеры. Пытались как-то использовать подобную систему для ежесменного обхода территории небольшого локомотивного депо. Идея была в автоматизации журнала обхода. Но оказалось, что робот не может открыть дверь в цех, чтобы проверить, не течёт ли кран, не может по лестнице на второй этаж подняться. А главное — он не может провести простейший субъективный анализ: ?пахнет горелой изоляцией? или ?слышен посторонний стук?. Пришлось оставить его только для периметра, где он фиксировал несанкционированное проникновение, что тоже полезно, но не совсем то, на что рассчитывали.
Поэтому при выборе решения нужно предельно чётко формулировать техническое задание. Если в компании ООО Сычуань Хунцзинжунь Технолоджи спрашивают про робота для осмотра, хороший инженер с их стороны должен сначала уточнить: ?А что именно осматривать? Какие дефекты искать? В каких условиях??. Их ассортимент, судя по сайту, широк: от роботов для осмотра подвижного состава до роботов для инженерного строительства. Это говорит о модульном подходе, когда базовая платформа может оснащаться разным набором сенсоров и инструментов под задачу. Это правильный путь.
Технические тонкости, о которых редко говорят в рекламе
Энергоавтономность. Это больная тема. Аккумуляторы на холоде садятся в разы быстрее. Для длительного патрулирования больших территорий станций нужны или мощные батареи с подогревом, или инфраструктура для беспроводной зарядки в ключевых точках маршрута. Иначе робот половину смены будет добираться до зарядки и обратно.
Устойчивость связи. В условиях насыщенной металлоконструкциями железнодорожной среды радиоканал между роботом и оператором может прерываться. Нужны устойчивые протоколы и, часто, ретрансляторы. Или закладывать в алгоритм поведение на потерю связи: остановиться и ждать, продолжить маршрут по памяти, вернуться на последнюю точку устойчивой связи.
Обработка данных. Вот здесь скрывается главная нагрузка. Робот за смену может собрать терабайты видео и телеметрии. Если всё это сваливать на человека-оператора, он просто не справится. Нужна обязательная фильтрация и предварительный анализ на борту. То есть система должна присылать не 8 часов видео, а 20 помеченных фрагментов по 30 секунд с пометкой ?возможная трещина?, ?объект в запретной зоне?, ?температурная аномалия?. Такие решения уже есть, и они часто поставляются в комплекте с серьёзными системами, как те, что разрабатывает ООО Сычуань Хунцзинжунь Технолоджи в рамках своих AI-интеллектуальных платформ.
Взгляд в будущее: интеграция и специализация
Думаю, будущее роботов для наружного инспекционного контроля на железной дороге — не в создании одного суперробота, а в развитии экосистемы взаимосвязанных специализированных агентов. Лёгкий дрон для осмотра крыш депо, наземный робот для осмотра путей и нижних частей конструкций, может быть, даже ползающий по стенам для осмотра фасадов. Все они будут передавать данные в единую платформу, которая, сопоставляя информацию, будет давать целостную картину состояния актива.
Второй тренд — углубление анализа. Не просто ?есть коррозия?, а ?коррозия 3-й степени, скорость развития оценивается как высокая, рекомендованный срок устранения — 3 месяца, иначе потребуется замена узла?. Это уровень предиктивной аналитики, и для него робот — лишь один из источников данных, наравне с датчиками стационарного мониторинга.
Компании, которые хотят остаться на этом рынке, должны предлагать именно такие комплексные сервисы. Если вернуться к примеру ООО Сычуань Хунцзинжунь Технолоджи, то их упоминание в контексте цифрового двойника и MES-систем — это как раз движение в эту сторону. Робот становится не самоцелью, а частью большого контура управления жизненным циклом железнодорожной инфраструктуры. И в этом, пожалуй, и есть главный профессиональный вывод: сам по себе железный ящик на колёсах ценности почти не имеет. Ценность создаёт правильно выстроенный процесс, в котором этот ящик — важное, но не единственное звено.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Сетевое коммутационное устройство
Сетевое коммутационное устройство -
 Шкафы электротехнические по индивидуальному заказу
Шкафы электротехнические по индивидуальному заказу -
 Система онлайн-мониторинга вторичной молниезащиты
Система онлайн-мониторинга вторичной молниезащиты -
 Трансформатор тока с разъемным сердечником
Трансформатор тока с разъемным сердечником -
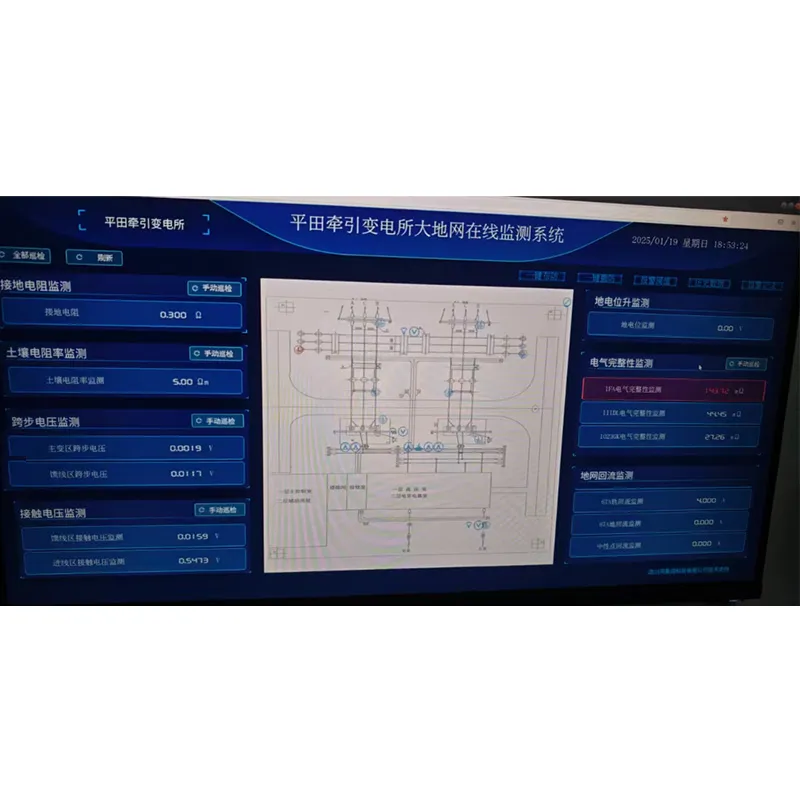
 Система онлайн-мониторинга газа SF6
Система онлайн-мониторинга газа SF6 -
 Система онлайн-мониторинга аккумуляторных батарей
Система онлайн-мониторинга аккумуляторных батарей -
 Беспилотный летательный аппарат для инспекции контактной сети
Беспилотный летательный аппарат для инспекции контактной сети -
 Изолятор
Изолятор -
 48V Параллельная система связи электропитания
48V Параллельная система связи электропитания -
 Источник бесперебойного питания специализированный для комплектных трансформаторных подстанций КТП
Источник бесперебойного питания специализированный для комплектных трансформаторных подстанций КТП -
 Источник бесперебойного питания онлайн-типа серии BUS высокочастотный 1-10 кВА
Источник бесперебойного питания онлайн-типа серии BUS высокочастотный 1-10 кВА -
 Устройство гибкого параллельного питания для систем связи
Устройство гибкого параллельного питания для систем связи