-


-


-


WeChat

Подвесной внутриплощадочный робот-инспектор
Когда слышишь ?подвесной внутриплощадочный робот-инспектор?, первое, что приходит в голову — это какая-то футуристичная штука на рельсах под потолком, которая сама всё видит и проверяет. Но на практике, особенно в условиях наших старых депо, всё упирается не в ?интеллект?, а в банальную механику и возможность вписаться в существующую инфраструктуру. Многие заказчики думают, что купил робота — и все проблемы с инспекцией оборудования решены. А на деле начинается самое интересное: согласование точек крепления, маршрутов, доступа к данным, да и просто уборка пыли с его камер после недели работы.
От концепции к первой балке
Идея витала давно. Ручной обход, особенно на крупных сортировочных станциях или в депо по ремонту подвижного состава — это время, человеческий фактор, пропущенные дефекты. Камеры стационарные — слепые зоны. Знакомая компания, ООО Сычуань Хунцзинжунь Технолоджи, как раз из тех, кто не просто продаёт ?роботов?, а пытается встроить их в общую систему ?интеллектуализации железнодорожного транспорта?. На их сайте hjrun.ru в разделе эксплуатации и техобслуживания как раз фигурируют ?роботы для осмотра оборудования и объектов на территории депо и станций?. Вот наш подвесной внутриплощадочный робот-инспектор по сути и есть развитие этой линии.
Первые прототипы были, скажем так, слишком универсальными. Хотели, чтобы он и по стенам ездил, и под потолком, и снимал в 4K. Но когда привезли на тестовую площадку в одно из наших локомотивных депо, сразу стало ясно: главный враг — это не недостаток функций, а существующие коммуникации. Трубопроводы, кабельные трассы, кран-балки — всё это нагромождено под кровлей. Идеальный свободный потолок — это роскошь. Пришлось пересматривать конструкцию подвеса, делать его более компактным и с увеличенным клиренсом.
Ключевым стал вопрос питания и связи. Проводной вариант отпал сразу — ограничение по длине, риск обрыва. Беспроводной Wi-Fi в металлическом ангаре с кучей помех — тоже не панацея. Остановились на гибридном варианте: силовая шина вдоль маршрута плюс защищённый радиоканал на определённых частотах, которые меньше всего ?глушатся? промышленным оборудованием. Это не было инновацией, скорее, прагматичным заимствованием из опыта их же систем мониторинга заземляющих сетей.
?Глаза? робота и то, что они не видят
Сенсорный набор — это отдельная история. Стандартный набор: камеры видимого спектра, тепловизор, иногда 3D-сканер. Но для подвесного внутриплощадочного инспектора критичным оказался не столько тип сенсора, сколько его расположение и защита. Пыль, влага, перепады температур — обычное дело. Однажды после плановой обкатки тепловизор начал показывать странные аномалии. Оказалось, на линзу села тончайшая металлическая пыль от шлифовки колёсных пар в соседнем пролёте. Пришлось разрабатывать систему продувки сжатым воздухом и откидные защитные шторки, срабатывающие при движении.
А ещё — угол обзора. Робот движется по заданному пути и смотрит вниз и по сторонам. Но многие дефекты, например, трещины в верхних поясах ферм или состояние изоляторов на верхней части оборудования, требуют взгляда снизу вверх или под углом. Пришлось вводить в конструкцию поворотные модули камер с увеличенными углами отклонения. Это добавило сложности в балансировке и управлении, но без этого его ценность как инспектора падала вдвое.
Здесь как раз пригодился опыт ООО Сычуань Хунцзинжунь Технолоджи в области AI-интеллектуальных платформ. Сами по себе сырые данные с камер — это просто видео. Ценность — в автоматическом анализе. Мы начали с простого: распознавание открытых/закрытых дверей шкафов, наличие посторонних предметов в проходах, контроль температуры узлов на трансформаторах. Алгоритмы обучали на реальных данных с нашего же депо, и первые итерации были комичными: робот ?пугался? теней от проезжающих тележек или принимал блик от масляной лужи за перегрев. Со временем, конечно, научили.
Интеграция: где ломаются самые красивые системы
Вот тут и начинается настоящая работа. Подвесной робот-инспектор — не остров. Его данные должны стекаться в общую систему управления депо или станции. У Хунцзинжунь Технолоджи в портфеле есть ?интеллектуальная промышленная система MES с цифровым двойником?. В идеале, робот должен был стать одним из датчиков для этого цифрового двойника, постоянно обновляя его актуальным состоянием объектов.
Но на практике столкнулись с legacy-системами. Старое ПО диспетчерской, разные протоколы связи, нежелание обслуживающего персонала работать с ещё одним интерфейсом. Пришлось делать промежуточный шлюз, который трансформировал данные от робота в простые сигналы ?норма/предупреждение/авария? и выводил их на уже существующие мнемосхемы. Потеряли в детализации, но выиграли во внедрении. Это был компромисс.
Ещё один нюанс — планирование маршрутов. Изначально думали, что робот будет курсировать по жёсткому графику. Но жизнь в депо непредсказуема: где-то поставили на внеплановый ремонт вагон, перегородив часть зоны видимости, где-то идёт погрузка запчастей. Пришлось внедрять систему приоритетов и возможность для диспетчера вручную скорректировать маршрут или поставить инспекцию конкретной зоны в очередь. Без гибкости система бы просто заглохла через неделю.
Уроки и неочевидные применения
Были и неудачи. Одна из попыток использовать робота для инспекции состояния кровли провалилась. Вибрация от движения по подвесу, даже минимальная, делала изображение с макрокамер для поиска микротрещин непригодным. Пришлось признать, что для таких задач нужен отдельный, специализированный дрон или стационарные датчики. Нельзя одним инструментом закрыть все задачи.
Зато открылись неожиданные плюсы. Помимо чисто технической инспекции, робот стал невольным контролёром соблюдения техники безопасности. Он фиксировал, оставлены ли без присмотра инструменты, правильно ли размещены ограждения. Его данные даже использовали в разборе одного небольшого инцидента — помогло восстановить хронологию событий. Это, кстати, перекликается с другим продуктом компании — ?AI-интеллектуальной платформой контроля безопасности персонала?.
Сейчас, оглядываясь назад, понимаю, что главная ценность такого подвесного внутриплощадочного робота-инспектора — не в том, чтобы заменить человека, а в том, чтобы стать его ?второй парой глаз?, которая никогда не устаёт и находится именно там, куда человеку не всегда удобно или безопасно заглянуть. Это инструмент для рутинного, постоянного мониторинга, который выявляет аномалии, а диагноз и действия всё равно остаются за специалистом. И в этом плане подход ООО Сычуань Хунцзинжунь Технолоджи, который интегрирует робота в более широкий контекст систем безопасности и эксплуатации, кажется мне наиболее здравым. Просто привезти и повесить ?умную камеру на рельсах? — мало. Нужно, чтобы она стала частью технологического процесса, со всеми его несовершенствами и требованиями.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Промышленный шлюз
Промышленный шлюз -
 Устройство онлайн-мониторинга аккумуляторных батарей
Устройство онлайн-мониторинга аккумуляторных батарей -
 Робот для инспекции подстанций (внешнего применения)
Робот для инспекции подстанций (внешнего применения) -
 Сетевое коммутационное устройство
Сетевое коммутационное устройство -
 Система онлайн-мониторинга оксидно-цинковых разрядников
Система онлайн-мониторинга оксидно-цинковых разрядников -
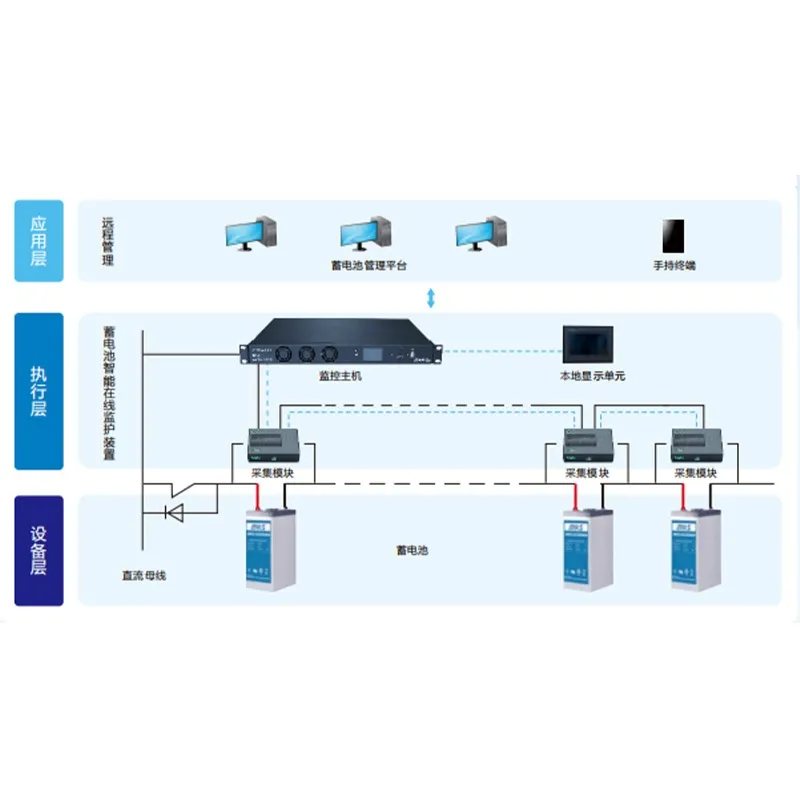 Устройство онлайн-контроля и защиты аккумуляторных батарей
Устройство онлайн-контроля и защиты аккумуляторных батарей -
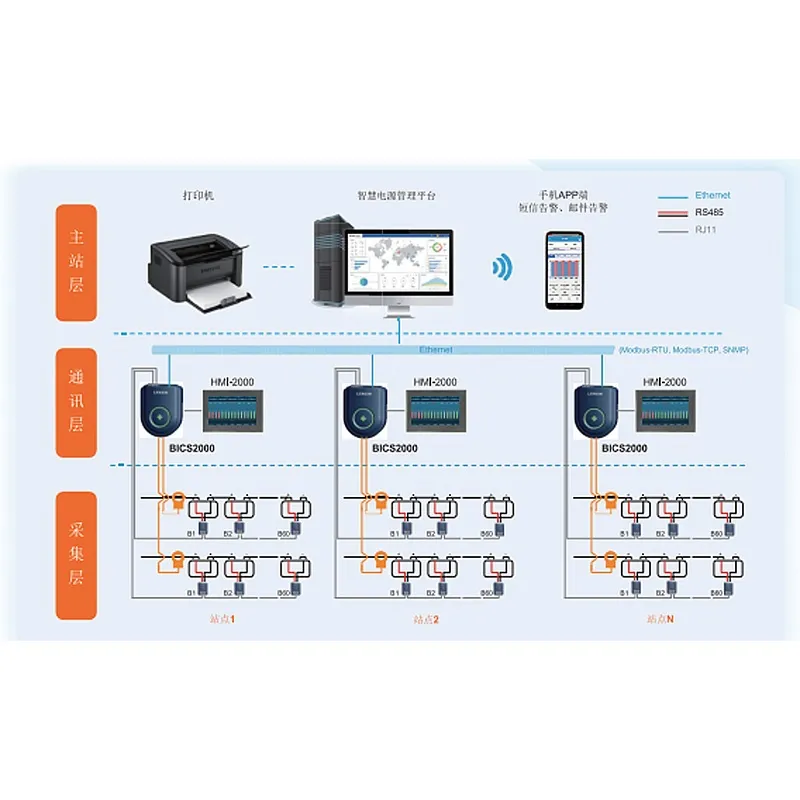
 48V Параллельная система связи электропитания
48V Параллельная система связи электропитания -
 Портативный измеритель импеданса заземления
Портативный измеритель импеданса заземления -
 Система интеллектуальной эксплуатации и технического обслуживания тяговых подстанций
Система интеллектуальной эксплуатации и технического обслуживания тяговых подстанций -
 Трансформатор тока с проходной шиной
Трансформатор тока с проходной шиной -
 Параллельная интегрированная система электропитания
Параллельная интегрированная система электропитания -
 Прибор для лазерной очистки электросетей от препятствий
Прибор для лазерной очистки электросетей от препятствий