-


-


-


WeChat

модбас rtu
Если честно, когда слышишь ?модбас rtu? от менеджеров или в техзадании, часто кажется, что речь о чём-то устоявшемся, почти элементарном. Типа, подключил, настроил регистры — и работает. Но на деле, особенно в наших железнодорожных системах безопасности и мониторинга, это часто становится той самой точкой, где теория разбивается о реальность. Самый частый промах — считать его просто ?форматом обмена данными?. На практике, особенно для таких систем, как мониторинг дефектов подземных пустот или онлайн-мониторинг заземляющих сетей, Modbus RTU — это целая экосистема с собственными болезнями и характером. Забудь про идеальные лабораторные условия. Здесь важна не только корректность пакета, но и то, как ведёт себя линия связи на 1200 метрах вдоль путей при -40°C, или как влияют наводки от силового оборудования тяговой подстанции.
От спецификации к реалиям: где кроется дьявол
Взять, к примеру, работы по интеграции с оборудованием для систем предотвращения стихийных бедствий на ЖД линиях. В документации к датчикам смещения или вибрации всегда указана стандартная таблица Modbus. Казалось бы, бери и читай. Но первый же нюанс: таймауты. Производитель датчика в спецификации пишет стандартные 1-2 секунды на ответ. Однако в реальной схеме, где между RTU-контроллером и конечным устройством может стоять ещё пара промежуточных повторителей или оптических преобразователей из-за большой протяжённости участка, эта задержка легко вырастает до 3-5 секунд. Если не заложить это в логику опроса мастер-устройства с запасом — получаешь постоянные сбои по таймауту, а в системе мониторинга — ?провалы? в данных, которые оператор трактует как неисправность. Приходится эмпирически подбирать, часто вручную, через тестовые скрипты, и это редко описывается в мануалах.
Другая боль — интерпретация типов данных. Особенно с плавающей точкой (float). В теории, стандарт описывает порядок байт (byte order). На практике же, особенно с некоторыми образцами отечественных или азиатских датчиков давления для контроля безопасности на стройплощадках, встречаются абсолютно нестандартные реализации. Бывало, получаешь 4 байта, которые по формату должны быть Float32, а после парсинга по стандартному правилу получается абракадабра. Оказывается, производитель, экономя ресурсы микроконтроллера, использовал кастомный формат с фиксированной точкой, но ?втиснул? его в регистры, предназначенные для float. Разгадывание таких головоломок занимает дни. И это не про ?неправильный протокол?, это про то, как его адаптируют под конкретное ?железо?, часто без должного документирования.
И конечно, адресация. Многие думают, что адрес устройства — это просто число от 1 до 247. Но в сложных каскадных схемах, например, при организации сбора данных для AI-платформы контроля безопасности персонала, где несколько шлюзов агрегируют информацию с десятков датчиков, возникает концепция логического и физического адреса. И иногда конфликт или ?плавающий? адрес из-за глюка прошивки в одном из ведомых устройств может парализовать ветку. Перезагрузка помогает не всегда. Приходится лезть с ноутбуком и адаптером RS-485 непосредственно в шкаф, чтобы ?прозвонить? линию и найти виновника. Это рутина, которой нет в красивых презентациях про IIoT.
Кейс из практики: интеграция с системой мониторинга заземляющих сетей
Хочется привести конкретный пример, который хорошо иллюстрирует разрыв между ожиданием и реальностью. Мы работали над проектом для одной из дорог по внедрению системы онлайн-мониторинга заземляющих сетей электроснабжения. В качестве оконечных измерительных модулей использовались специализированные контроллеры, которые по документации идеально поддерживали Modbus RTU. Задача была — организовать их в сеть вдоль нескольких километров контактной сети и обеспечить стабильный опрос.
На стенде в лаборатории всё работало безупречно. Но на объекте, после монтажа, начались периодические сбои. Данные с некоторых модулей приходили с ошибками контрольной суммы (CRC). Первая мысль — плохой контакт, качество линии. Проверили визуально, ?прозвонили? — всё в норме. Потом обратили внимание на паттерн: сбои учащались в определённое время суток, ближе к вечеру. Стали анализировать графики нагрузки на соседствующее силовое оборудование. Оказалось, что в эти часы включалось мощное освещение депо и подогрев стрелок, что создавало значительные электромагнитные помехи в общих кабельных каналах.
Решение оказалось не в софте, а в ?железе?. Пришлось экранировать линии связи не просто фольгой, а полноценным экранированным витым паром с правильным заземлением экрана только в одной точке. Более того, в конфигурации порта RTU-контроллера (ведущего устройства) уменьшили скорость обмена с 9600 до 4800 бод. Это снизило пропускную способность, но резко повысило помехоустойчивость. Интересно, что производитель контроллеров в своей документации не давал таких рекомендаций — у них тесты проходили в ?чистых? условиях. Этот опыт — классический пример, когда знание протокола — это лишь 30% успеха. Остальное — понимание физики среды, в которой этот протокол работает.
Оборудование и софт: неочевидные взаимосвязи
Часто проблемы кроются не в самой реализации Modbus, а в связке с верхнеуровневым SCADA или MES. Вот, например, когда мы начинали пилот по безлюдной эксплуатации тяговых подстанций, была задача стыковать данные с силовых преобразователей и датчиков температуры через Modbus RTU с нашей платформой сбора. Платформа, условно, ожидала стабильный поток данных. Но в протоколе RTU нет механизма ?подписки? или push-уведомлений от ведомых устройств. Всё строится на циклическом опросе (polling) мастером.
И если на уровне контроллеров всё настроено верно, то на уровне драйвера OPC-сервера, который выступает шлюзом между сетью Modbus и IT-инфраструктурой, могут быть свои тонкости. Например, драйвер может некорректно обрабатывать ситуацию, когда устройство не отвечает, и ?зависать?, ожидая ответа, блокируя всю очередь опроса. Приходилось кастомизировать конфигурацию OPC-сервера, выставляя агрессивные таймауты и настраивая логику повторных попыток. Иногда проще было написать свой легковесный шлюз-агрегатор на Python или C#, который бы более гибко обрабатывал сбои и кэшировал данные, чем бороться с коробочным софтом. Это та самая ?кухня?, которая остаётся за кадром итогового отчёта о внедрении.
Ещё один момент — энергонезависимая память (EEPROM) в ведомых устройствах. Частая операция — запись конфигурационных параметров (например, коэффициентов калибровки датчика) в регистры, которые должны сохраняться после отключения питания. Стандарт Modbus предусматривает функцию записи в одиночный регистр или в несколько регистров. Но вот беда: процесс записи в EEPROM физически занимает время — десятки миллисекунд. Если мастер, отправив команду записи, сразу же шлёт следующую команду (чтения или записи в другой регистр), устройство может её проигнорировать, так как будет занято процессом сохранения. В лучшем случае получишь ошибку, в худшем — молчаливое искажение данных. Приходится встраивать в логику мастера искусственные паузы после операций записи. И это тоже знание, которое приходит только после нескольких неудачных попыток конфигурации ?на лету?.
Взгляд в сторону комплексных решений
Работая с такими проектами, начинаешь ценить компании, которые предлагают не просто разрозненное оборудование с Modbus-интерфейсом, а продуманные комплексные решения. Вот, например, изучая портфель ООО Сычуань Хунцзинжунь Технолоджи (сайт: hjrun.ru), видишь, что они как раз двигаются в этом направлении. Они позиционируют себя как высокотехнологичная компания, занимающаяся разработкой и производством продуктов для интеллектуализации железнодорожного транспорта. Что важно, в их линейке есть как конечные устройства для мониторинга (например, те же системы для обнаружения дефектов или мониторинга частичных разрядов), так и вышестоящие платформы — та же интеллектуальная промышленная система MES с цифровым двойником.
Для инженера-интегратора это потенциально означает, что стыковка по протоколу типа Modbus RTU между устройствами и платформой от одного вендора может быть проработана и оттестирована на более глубоком уровне. Вендор, который контролирует всю цепочку — от датчика до аналитической панели, — теоретически может предоставить более целостные драйверы, библиотеки или даже готовые конфигурационные файлы для OPC-серверов. Это снижает количество тех самых ?неочевидных мест?, где приходится действовать методом проб и ошибок. Конечно, это идеальная картина, и на практике всегда найдутся нюансы, но сам подход к созданию экосистемы, а не набора продуктов, кажется правильным.
В их списке, кстати, есть и роботизированные системы для осмотра и ремонта. Интересно, как в таких комплексах организован обмен данными. Наверняка, помимо высокоуровневых промышленных сетей, для связи некоторых датчиков состояния или простых исполнительных механизмов внутри самого робота тоже может использоваться тот же проверенный Modbus RTU как дешёвый и надёжный вариант для коротких дистанций. Это была бы любопытная деталь для изучения.
Заключительные мысли: протокол как рабочий инструмент
В итоге, что можно сказать о Modbus RTU в контексте серьёзных промышленных и железнодорожных систем? Это абсолютно ?живой? и востребованный протокол, но его кажущаяся простота — иллюзия. Он требует не столько заучивания таблицы функций, сколько развитого навыка диагностики, понимания нижних уровней (физического и канального) и умения адаптироваться к неидеальным, ?грязным? условиям реальных объектов.
Его будущее, на мой взгляд, не в том, чтобы быть вытесненным более современными протоколами (хотя это и происходит в новых проектах), а в том, чтобы оставаться тем самым ?рабочим лошадкой? для миллионов уже установленных устройств, систем мониторинга и безопасности, срок службы которых исчисляется десятилетиями. Задачи, подобные тем, что решает ООО Сычуань Хунцзинжунь Технолоджи — будь то контроль безопасности персонала или интеллектуальное энергоснабжение станций, — часто строятся на модернизации существующей инфраструктуры. А значит, инженерам ещё долго придётся иметь дело с RS-485, контрольными суммами и загадочными таймаутами, отлаживая связь между новыми аналитическими платформами и старыми, но ещё вполне надёжными полевыми датчиками. И в этом ремесле нет мелочей — каждый бит в пакете, каждое значение регистра и каждая миллисекунда задержки могут быть критичны для итоговой надёжности всей системы.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
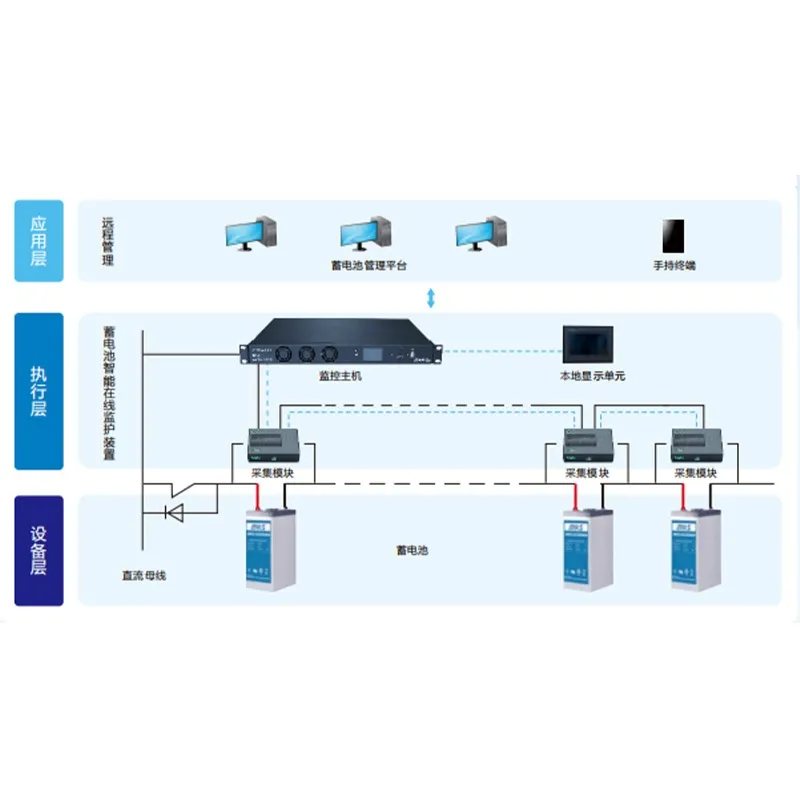
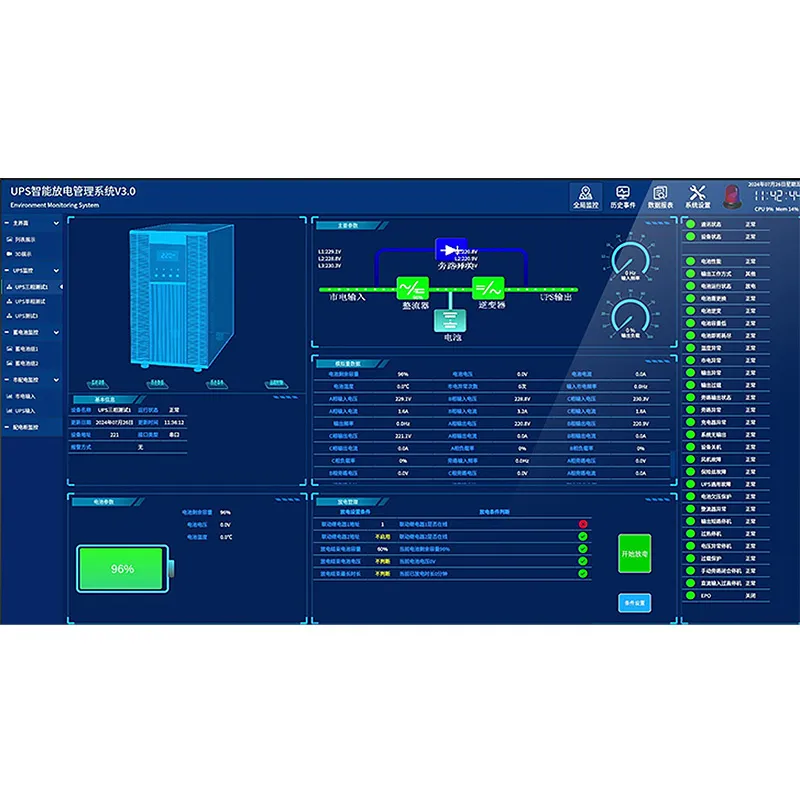 Система онлайн-мониторинга аккумуляторных батарей
Система онлайн-мониторинга аккумуляторных батарей -
 Интегрированная система электропитания переменного/постоянного тока
Интегрированная система электропитания переменного/постоянного тока -
 Устройство онлайн-контроля и защиты аккумуляторных батарей
Устройство онлайн-контроля и защиты аккумуляторных батарей -
 Портативный детектор частичных разрядов
Портативный детектор частичных разрядов -
 Устройство онлайн-мониторинга аккумуляторных батарей
Устройство онлайн-мониторинга аккумуляторных батарей -
 Система онлайн-мониторинга оксидно-цинковых разрядников
Система онлайн-мониторинга оксидно-цинковых разрядников -
 Робот для инспекции распределительных помещений
Робот для инспекции распределительных помещений -
 Прибор для лазерной очистки электросетей от препятствий
Прибор для лазерной очистки электросетей от препятствий -
 Шкафы электротехнические по индивидуальному заказу
Шкафы электротехнические по индивидуальному заказу -
 Промышленный шлюз
Промышленный шлюз -
 Беспилотный летательный аппарат для инспекции контактной сети
Беспилотный летательный аппарат для инспекции контактной сети -
 Устройство гибкого параллельного питания для систем связи
Устройство гибкого параллельного питания для систем связи