-


-


-


WeChat

Крюковой робот-инспектор
Когда слышишь ?крюковой робот-инспектор?, первое, что приходит в голову — какой-то механический захват, болтающийся под вагоном. Многие в отрасли до сих пор так и думают, сводя всю суть к автоматизации визуального осмотра ходовых частей. На деле, если копнуть, это целый комплекс решений, где ?крюк? — лишь точка входа в мир данных. Самый большой пробел в понимании — считать его просто заменой человека с фонарём. Реальность сложнее: это система, которая должна не только увидеть, но и понять контекст дефекта, спрогнозировать его развитие и вписаться в логику ремонтного цикла депо. И вот здесь начинаются настоящие сложности.
От концепции к железной реальности
Изначальная идея казалась элегантной: робот на рельсовой тележке с выдвижной штангой-манипулятором, на конце — камера и датчики. Заезжает под стоящий на ТО состав, сканирует буксы, колёсные пары, элементы подвески. Но первая же попытка внедрения в одном из наших проектов упёрлась в ?грязную? среду. Смазка, пыль, конденсат, переменное освещение — алгоритмы компьютерного зрения, обученные на чистых моделях, просто терялись. Пришлось на ходу перестраивать подход, комбинировать съёмку в разных спектрах, добавлять систему продувки оптики. Это был первый урок: железная дорога не лаборатория.
Ключевым стал вопрос позиционирования. Точность в пару миллиметров для идентификации трещины — необходимость. Но как её добиться, когда робот движется по неидеальным рельсам внутри депо, а состав может иметь небольшой крен? Использовали систему прецизионных датчиков и лазерных маркеров, интегрированную с общей системой позиционирования депо. Это подводит к важному моменту: крюковой робот-инспектор редко работает сам по себе. Его эффективность кратно возрастает в связке с другими системами, например, с тем же цифровым двойником депо или MES-системой. Тогда данные от робота не становятся просто отчётом, а превращаются в управляющее воздействие на график ремонта.
В этом контексте интересен опыт коллег из ООО Сычуань Хунцзинжунь Технолоджи. На их сайте https://www.hjrun.ru видно, что они рассматривают роботов для осмотра подвижного состава как часть более широкой экосистемы ?Эксплуатация и техническое обслуживание?. Это правильный подход. Их портфель, включающий, помимо прочего, интеллектуальную промышленную систему MES с цифровым двойником, — это как раз та самая среда, где данные от инспекционного робота обретают смысл. Сам по себе робот — инструмент. Встроенный в цифровой процесс — это уже элемент интеллектуального предприятия.
?Увидел трещину? vs ?Понял критичность?
Следующий барьер — переход от обнаружения к анализу. Ранние версии нашего робота-инспектора исправно сыпали предупреждениями: ?потенциальная трещина?, ?возможный износ?. Это приводило к ?алертной усталости? у персонала. Инженеры начинали игнорировать часть сообщений. Суть не в том, чтобы найти всё, что хоть немного похоже на дефект, а в том, чтобы ранжировать риски. Пришлось плотно заняться обучением нейросетевых моделей на реальных, размеченных совместно с опытными осмотрщиками данных. Важно было научить систему отличать безобидную царапину от зарождающейся усталостной трещины, которая через 5 тысяч километров может стать критичной.
Здесь мы столкнулись с проблемой базы знаний. Опыт конкретного депо, особенности эксплуатации определённых серий вагонов — всё это локальные знания. Универсальная модель здесь работает плохо. Решение — создание адаптивных алгоритмов, которые ?подстраиваются? под парк конкретного заказчика. Например, для депо, обслуживающего в основном магистральные грузовые вагоны, акценты смещаются на износ буксовых узлов, а для депо электропоездов — на элементы пантографов и подвески. Это долгая и кропотливая работа, которую не описать в маркетинговом буклете.
Интересно, что в продуктовой линейке ООО Сычуань Хунцзинжунь Технолоджи есть AI-интеллектуальная платформа контроля безопасности персонала. Принцип схож: задача не в тотальном контроле, а в выявлении отклонений от безопасной практики. Та же философия применима и к крюковому инспектору: его цель — выявить отклонение от нормы, которое несёт операционный риск. Их подход к безопасности как к комплексной системе (от мониторинга дефектов пустот до контроля разрядов) показывает понимание, что изолированные решения на железной дороге неэффективны.
Интеграция в существующие процессы: боль и необходимость
Самое сложное в внедрении любого робота, включая инспекционного, — не технологии, а люди и процессы. Привезти ?чудо-машину? и поставить в депо — путь к провалу. Стандартная процедура ТО — это отлаженный, часто консервативный процесс. Внедрение крюкового робота требует его пересмотра. Например, нужно ли теперь ставить вагон на определённую позицию? Как совместить работу робота и людей на соседних путях? Кто и как интерпретирует финальный отчёт?
Мы начинали с пилотных смен, когда робот работал параллельно с осмотрщиками, а их заключения сравнивались. Это помогло и дообучить алгоритмы, и дать персоналу уверенность в системе. Важно было не создать впечатление, что робот их заменяет, а показать, что он — инструмент, снимающий с них рутинную часть и повышающий ответственность за итоговое решение. Внедрение шло через изменение инструкций и, что критично, через доработку программного обеспечения для формирования отчёта в привычном для депо формате.
Опыт компании ООО Сычуань Хунцзинжунь Технолоджи в создании систем для безлюдной эксплуатации подстанций и интеллектуального энергоснабжения говорит о том, что они хорошо понимают важность бесшовной интеграции. Их решения, судя по описанию, направлены на встраивание в действующую инфраструктуру, а не на её полное замещение. Это правильный путь и для робота-инспектора: он должен стать естественным продолжением, а не инородным телом в технологической цепочке депо.
Экономика осмотра: что считать эффективностью?
Частый вопрос заказчика: ?Насколько это сократит время осмотра??. Вопрос правильный, но неполный. Да, автоматизированный крюковой робот может провести полный осмотр ходовой части быстрее человека. Но главный экономический эффект лежит в другой плоскости — в повышении предсказуемости и предотвращении инцидентов. Речь идёт о стоимости непредвиденного выхода из строя вагона в пути, о простое, о ремонте в неподготовленных условиях.
Поэтому при оценке эффективности мы стали считать не только скорость, а такие метрики, как ?процент выявленных критических дефектов на ранней стадии? и ?снижение количества отказов в межремонтный период?. Это сложнее, требует накопления статистики за год-два, но именно это убеждает руководство дорог. Робот здесь выступает как инструмент перехода от планово-предупредительного ремонта к ремонту по фактическому состоянию. Это стратегическое изменение.
Продукция серии ?Эксплуатация и техническое обслуживание? от ООО Сычуань Хунцзинжунь Технолоджи, куда входят и роботы для осмотра, явно нацелена на эту парадигму. Наличие в их линейке решений для обнаружения дефектов и цифрового двойника подтверждает фокус на прогнозной аналитике и управлении жизненным циклом активов, а не на простой автоматизации.
Взгляд вперёд: больше чем осмотр
Сегодняшний крюковой робот-инспектор — это в основном глаза и отчасти ?осязание? (благодаря лазерному сканированию для измерения износа). Но потенциал шире. Уже тестируются модули для экспресс-анализа смазки в буксах спектральными методами, прослушивания акустических шумов подшипников. Фактически, робот может эволюционировать в мобильную диагностическую платформу, которая при одном заезде под вагон собирает комплекс данных о состоянии.
Ещё одно направление — работа в связке с ремонтными роботами. Например, тот же робот-инспектор выявляет дефект, а система на его основе формирует задание для робота для ремонта или демонтажа, данные о котором также есть в портфеле ООО Сычуань Хунцзинжунь Технолоджи. Это создаёт замкнутый автоматизированный контур. Пока это выглядит как футуристика, но первые шаги в этом направлении уже делаются, и логика развития технологий к этому ведёт.
Так что, возвращаясь к началу. Крюковой робот-инспектор — это далеко не просто ?крюк?. Это узел в растущей нейронной сети цифрового железнодорожного депо. Его ценность определяется не сложностью механики, а глубиной интеграции в процессы и способностью превращать сырые данные в управляемые решения. И судя по подходу таких игроков, как ООО Сычуань Хунцзинжунь Технолоджи, которые развивают целые экосистемы для интеллектуализации транспорта, будущее именно за такими, связанными в единую сеть, решениями. А сам робот… он просто будет делать свою работу, тихо и без устали, под гул депо.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Портативный измеритель импеданса заземления
Портативный измеритель импеданса заземления -
 Система онлайн-мониторинга частичных разрядов
Система онлайн-мониторинга частичных разрядов -
 Датчик газа SF6
Датчик газа SF6 -
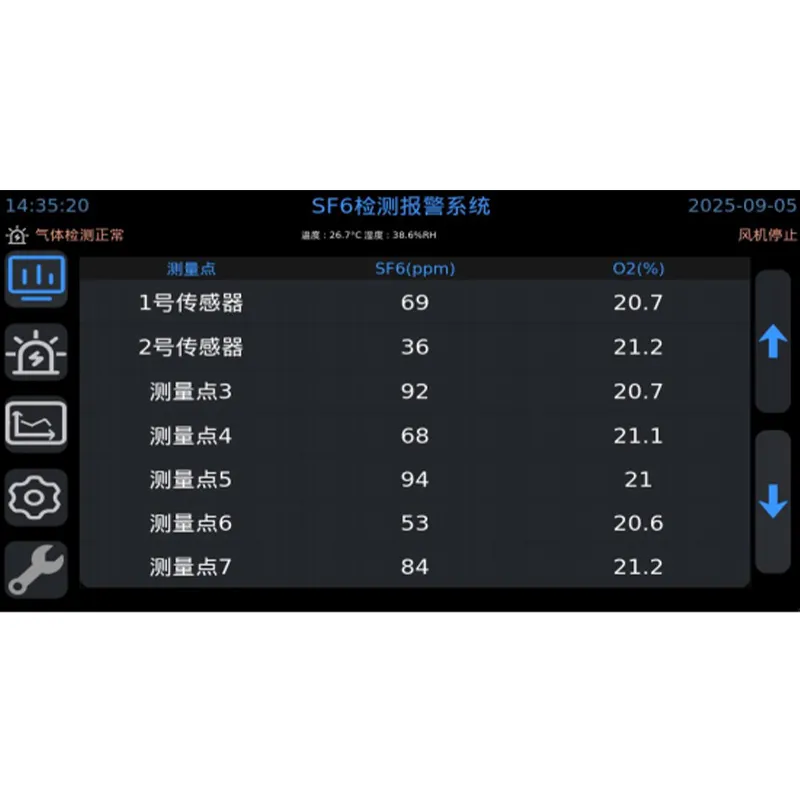 Система онлайн-мониторинга газа SF6
Система онлайн-мониторинга газа SF6 -
 Беспилотный летательный аппарат для инспекции контактной сети
Беспилотный летательный аппарат для инспекции контактной сети -
 Источник бесперебойного питания онлайн-типа серии BUS высокочастотный 20-100 кВА
Источник бесперебойного питания онлайн-типа серии BUS высокочастотный 20-100 кВА -
 Робот для инспекции распределительных помещений
Робот для инспекции распределительных помещений -
 Рельсовый инспекционный робот
Рельсовый инспекционный робот -
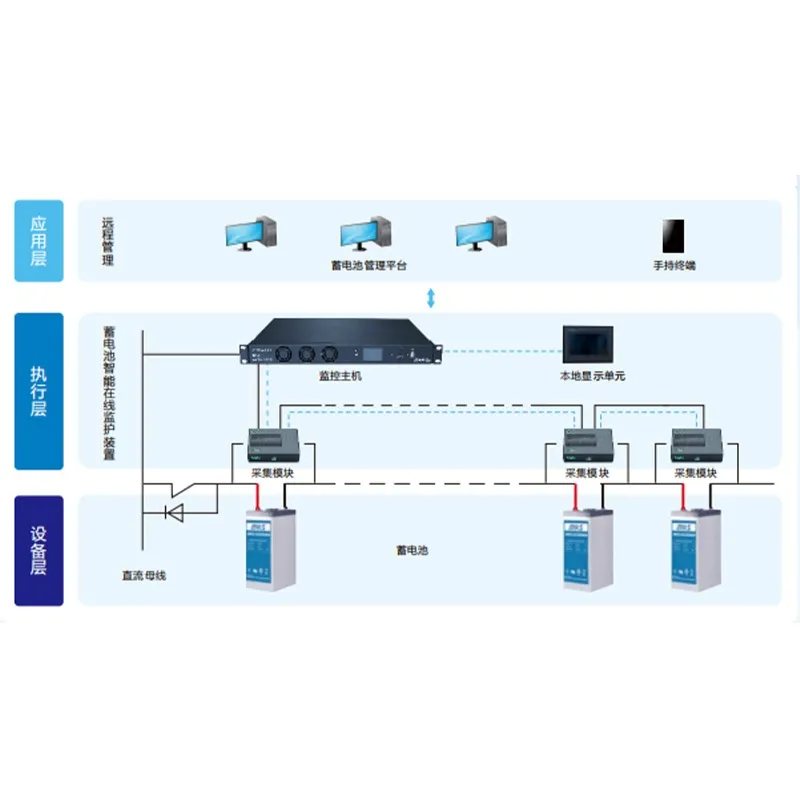
 Система онлайн-мониторинга аккумуляторных батарей
Система онлайн-мониторинга аккумуляторных батарей -
 Сетевое коммутационное устройство
Сетевое коммутационное устройство -
 Интегрированная система электропитания переменного/постоянного тока
Интегрированная система электропитания переменного/постоянного тока -
 Прецизионный трансформатор тока
Прецизионный трансформатор тока