-


-


-


WeChat

Инспекционный робот
Когда слышишь ?инспекционный робот?, первое, что приходит в голову — камера на тележке, которая ездит по рельсам и снимает. Но если ты хоть раз пытался внедрить эту штуку на реальном участке, особенно в условиях нашего климата и устаревшей инфраструктуры, понимаешь, что это лишь верхушка айсберга. Основная проблема — не в том, чтобы сделать робота, а в том, чтобы он действительно заменял человека в тех точках, где человек либо рискует жизнью, либо физически не может проверить всё досконально. Много раз видел проекты, где робот был по сути дорогой игрушкой, потому что его датчики не калибровались под конкретные типы дефектов, или ПО не умело отличать ржавчину от трещины. Вот об этих подводных камнях и хочется поговорить.
От концепции до депо: где теория отстаёт от практики
В теории всё просто: робот едет, сканирует, передаёт данные. На практике же, первый же выезд на объект — например, в депо для осмотра подвижного состава — упирается в массу нюансов. Освещение. В цеху может быть полумрак, а рядом с окнами — засветка. Стандартные алгоритмы компьютерного зрения тут часто сбоят. Приходится либо ставить дополнительные источники света на самого робота (а это вес, энергопотребление), либо долго и нудно обучать модель на данных именно с этого объекта. Это та работа, которую в презентациях не показывают.
Второй момент — навигация. GPS внутри не работает, метки на полу в рабочем депо — нереальны, всё заставлено. Часто используется SLAM (одновременная локализация и построение карты). Но когда вокруг движутся люди, тележки, меняется положение самих вагонов на ремонтных позициях, карта ?плывёт?. Робот может просто заблудиться. Мы в одном из проектов потратили месяца три, чтобы отладить систему навигации в таком динамическом окружении. И это был не уникальный робот, а серийная модель, которую просто пытались адаптировать.
И третий, самый больной вопрос — связь. Передавать потоковое HD-видео с термографической камеры по Wi-Fi в металлическом ангаре — та ещё задача. Задержки, обрывы. Приходится закладывать в логику робота возможность автономной работы: проехал участок — сохранил данные в буфер — нашёл ?окно? со связью — выгрузил. Это усложняет и hardware, и software. Многие заказчики сначала не понимают, почему робот не передаёт картинку в реальном времени на пульт, как в кино. Объясняешь, что в кино нет помех от силовой подстанции за стеной.
Железнодорожная специфика: больше чем осмотр
В контексте железной дороги инспекционный робот — это часто лишь часть большой экосистемы. Возьмём, к примеру, компанию ООО Сычуань Хунцзинжунь Технолоджи (сайт: hjrun.ru). Они позиционируют себя как высокотехнологичная компания, занимающаяся интеллектуализацией железнодорожного транспорта. И что важно, у них роботы для осмотра подвижного состава или оборудования депо — это не изолированные продукты, а звенья в цепочке решений для эксплуатации и техобслуживания. Это правильный подход.
Например, их робот для осмотра в депо, скорее всего, не просто собирает данные. Он, наверняка, интегрирован с той самой интеллектуальной промышленной системой MES и цифровым двойником. То есть, обнаружил потенциальный износ буксового узла — эта информация не просто попадает в отчёт, а сразу обновляет цифровую модель конкретного вагона, и система планирования ремотов может автоматически скорректировать график его обслуживания. Вот это и есть ценность: робот становится источником данных для принятия решений, а не просто средством удалённого просмотра.
Ещё один критически важный аспект — безопасность. Железная дорога — объект повышенной опасности. Робот, который лезет под вагон или обследует контактную сеть, должен быть не просто точным, но и сверхнадёжным в плане отказоустойчивости. Любой сбой в программе, который заставит его сделать резкое движение, может привести к повреждению дорогостоящего оборудования или контакту с высоким напряжением. Поэтому в таких проектах этапы тестирования и валидации поведения робота в нештатных ситуациях (потеря связи, сбой датчика, появление препятствия) иногда занимают больше времени, чем написание основного рабочего кода.
Дата — это хорошо, а интерпретация — всё
Современный инспекционный робот генерирует гигабайты данных: лидарные облака точек, термограммы, фото в высоком разрешении, виброакустические сигналы. Проблема сместилась со сбора на анализ. Можно иметь самого продвинутого робота, но если инженер потом должен вручную просматривать тысячи снимков, эффективность всей затеи падает в разы.
Здесь на первый план выходит ИИ, но не тот, о котором кричат в заголовках, а прикладной, обученный на очень узких задачах. Не ?найди все дефекты?, а ?классифицируй этот конкретный тип сварного шва по шкале из пяти градаций износа?. Для обучения таких моделей нужны размеченные данные, а их на железной дороге исторически мало. Получается парадокс: чтобы робот стал полезным, ему нужны данные для обучения, а чтобы собрать эти данные, нужен робот. Круговорот. Часто выходят из положения, начиная с полуавтоматического режима: робот собирает сырые данные, эксперт их размечает, модель дообучается, и с каждой итерацией степень автоматизации растёт.
Упомянутая компания ООО Сычуань Хунцзинжунь Технолоджи в своей линейке продуктов указывает AI-интеллектуальную платформу контроля безопасности персонала. Логично предположить, что аналогичные подходы с компьютерным зрением и машинным обучением они применяют и для анализа данных с инспекционных роботов. Важно, чтобы эта платформа умела не только детектировать аномалии, но и со временем выявлять тенденции — например, что определённый тип дефекта чаще появляется на участках пути с конкретным типом грунта или после определённого количества проходов гружёных составов. Это уже прогнозная аналитика, следующий уровень.
Полевые испытания: история одного ?неудачного? успеха
Хочу привести пример из практики, который хорошо иллюстрирует разрыв между лабораторными условиями и полем. Был проект по инспекции опор контактной сети с помощью робота на гусеничном ходу с манипулятором. Всё отлично работало на полигоне. Привезли на реальный перегон. Первая же проблема — растительность. Трава и кусты, которые в ТЗ не учитывались, полностью блокировали подъезд к некоторым опорам. Робот не был рассчитан на такое.
Вторая проблема — разнотипность опор. Чертежи были старые, а за годы эксплуатации некоторые узлы меняли, дорабатывали кустарно. Датчики робота, настроенные на ?идеальную? геометрию, не могли корректно прицелиться для сканирования сварных швов. В итоге, для почти 30% опор пришлось задействовать человека-оператора для дистанционного управления роботом в ручном режиме, что свело на нет часть ожидаемой экономии.
Но вот что интересно: этот проект был признан ?неудачным? по первоначальным KPI (полная автономность), однако заказчик остался доволен. Почему? Потому что даже в полуавтоматическом режиме робот позволил собрать по каждой опоре структурированный цифровой паспорт (геометрия, термограммы ключевых узлов, фото дефектов в привязке к координатам) — такого объёма и качества данных у них не было никогда. Это позволило спланировать ремонтную кампанию не ?по накатанной?, а исходя из реального состояния. Иногда полезность технологии раскрывается с неожиданной стороны.
Будущее: интеграция и специализация
Куда всё движется? На мой взгляд, будущее не за универсальными инспекционными роботами, а за узкоспециализированными платформами, которые глубоко интегрированы в отраслевые цифровые экосистемы. Как в портфеле той же Хунцзинжунь Технолоджи — отдельно робот для осмотра подвижного состава, отдельно — для ремонта и сборки, отдельно — для инженерного строительства. У каждого свои требования к платформе, манипуляторам, наборам датчиков.
Ключевым станет не ?железо?, которое довольно быстро стандартизируется, а софт и алгоритмы. Способность робота не только собирать, но и в реальном времени предварительно обрабатывать данные на edge-устройствах (то есть на самом роботе), чтобы передавать уже готовые инсайты, а не сырой поток. Это снизит требования к каналам связи.
И последнее — интерфейс взаимодействия. Оператор-диспетчер, который контролирует работу нескольких таких роботов, не должен быть программистом или инженером по компьютерному зрению. Интерфейс должен визуализировать статус, критичные предупреждения и рекомендации на понятном ему языке: ?У робота на участке 7К-12 снижена проходимость, вероятная причина — снежный нанос. Запланируйте очистку или переключите на резервный маршрут. По вагону № 450038 обнаружена температурная аномалия в узле №5, рекомендуется внеочередной осмотр?. Когда технология перестаёт быть технологией и становится просто рабочим инструментом, вот тогда она по-настоящему приживается.
Так что, если резюмировать, инспекционный робот — это история не про замену людей. Это история про то, как дать людям более качественную информацию для принятия решений и убрать их из опасных и рутинных мест. И самый сложный этап здесь — не разработка, а та самая ?доводка напильником? под жёсткие, неидеальные и очень специфические условия реальной железной дороги. Те, кто это понимает, как, судя по всему, команда hjrun.ru, и делают продукты, которые остаются на объектах, а не пылятся на складах после пилотного запуска.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Изолятор
Изолятор -
 Прецизионный трансформатор тока
Прецизионный трансформатор тока -
 Робот для инспекции распределительных помещений
Робот для инспекции распределительных помещений -
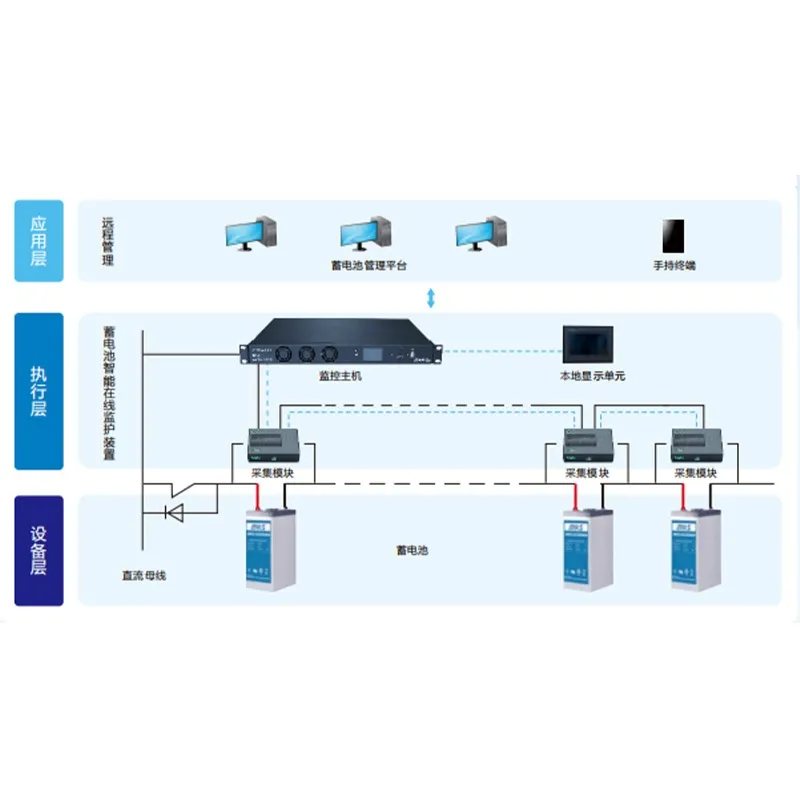
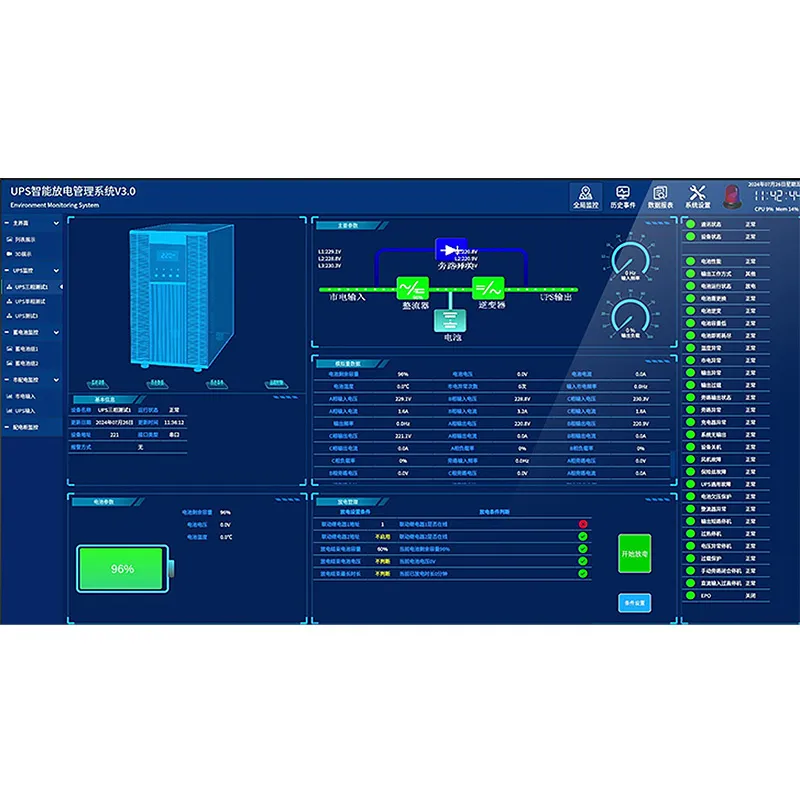 Система онлайн-мониторинга аккумуляторных батарей
Система онлайн-мониторинга аккумуляторных батарей -
 Трансформатор тока с разъемным сердечником
Трансформатор тока с разъемным сердечником -
 Беспилотный летательный аппарат для инспекции контактной сети
Беспилотный летательный аппарат для инспекции контактной сети -
 Рельсовый инспекционный робот
Рельсовый инспекционный робот -
 Устройство прогнозного предупреждения об отказе аккумуляторных батарей
Устройство прогнозного предупреждения об отказе аккумуляторных батарей -
 Датчик газа SF6
Датчик газа SF6 -
 Система гарантированного питания постоянного тока
Система гарантированного питания постоянного тока -
 Устройство онлайн-контроля и защиты аккумуляторных батарей
Устройство онлайн-контроля и защиты аккумуляторных батарей -
 Источник бесперебойного питания специализированный для комплектных трансформаторных подстанций КТП
Источник бесперебойного питания специализированный для комплектных трансформаторных подстанций КТП